Featured stories

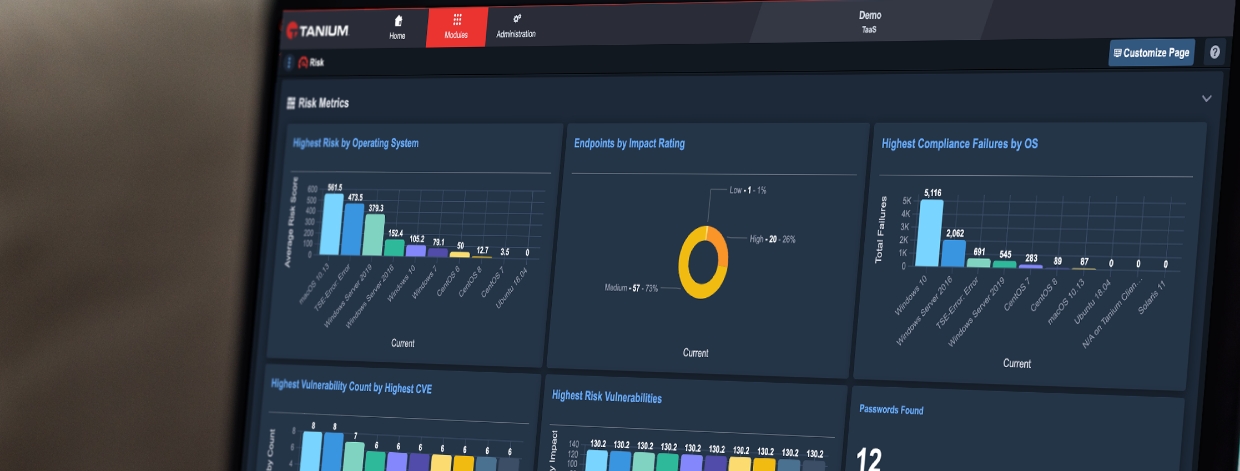
Preparing for Windows 10 End of Support
Tanium’s Guardian Spotlight - Windows 10 End of Support Dashboard offers a comprehensive, flexible solution to navigate this transition.
Module Deep Dive
Tanium’s Guardian Spotlight - Windows 10 End of Support Dashboard offers a comprehensive, flexible solution to navigate this transition.

Learn what CIS compliance means, why it matters for cybersecurity, and how aligning with CIS benchmarks helps.

The latest on UNC6032 fake AI websites, APT41’s use of Google Calendar, and Void Blizzard targeting critical sectors.

Understand the Davidson Window’s 2027 warning and how Tanium enables real-time cyber defense across federal IT.

See how cybersecurity exposure management reduces risk with the CTEM framework and actionable insights.
Get Tanium digests straight to your inbox, including the latest thought leadership, industry news and best practices for IT security and operations.